墨豆机器人硬件介绍¶
电源系统¶
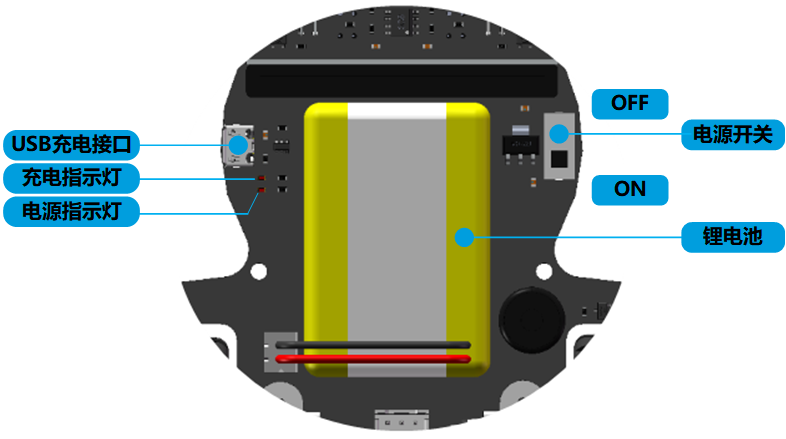
锂电池¶
机器人由一块容量为2000 mAh的可充电聚合物锂电池供电,典型情况下可提供最大5小时的续航时间。
充电接口¶
在机器人的左侧提供了一个USB充电接口,当机器人需要充电时请将产品附带的USB线或者兼容的USB 线缆为机器人充电,USB线缆一端连接机器人USB充电接口,另外一端连接充电器(比如手机或平板电脑充电器)或者电脑的USB插座。
充电指示灯¶
在USB充电接口的下方有一个LED充电指示灯,当充电开始后指示灯为绿色,电池充满后指示灯熄灭。
电源开关¶
机器人的电源开关位于机器人的右侧,将机器人开关拨至ON状态打开电源,拨至OFF状态关闭电源。
动力系统¶
墨豆机器人动力系统采用三轮后驱布局,由驱动轮提供动力和提供导向
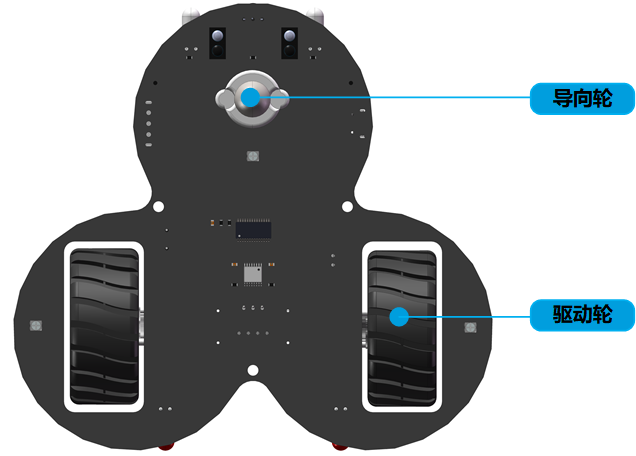
底盘驱动¶
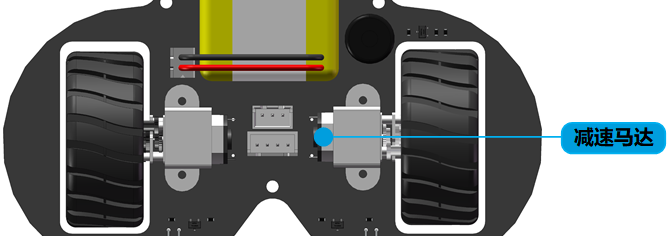
机器人配备了两个独立的驱动轮,每个驱动轮由一个直流减速马达提供动力。驱动轮的方向和速度 均可通过软件控制,支持0-100无级变速和正反向控制。编程和控制方法请参考本文档其它章节。
导向轮¶
导向轮主要为机器人提供导向功能,使机器人的运动更加灵活。
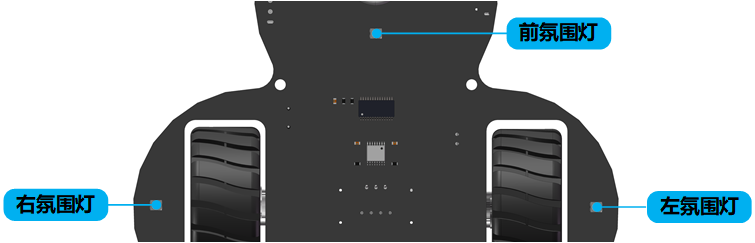
灯光系统¶
机器人配备了丰富的灯光系统,包括前置探照灯、后置尾灯和底盘氛围灯


传感器¶
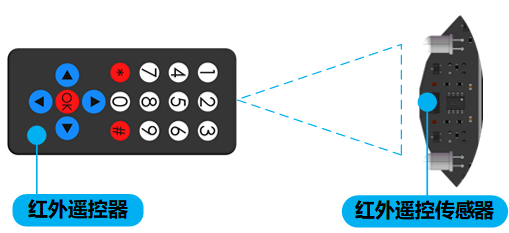
机器人通过传感器感知外部世界,除了microbit自带的传感器,墨豆机器人还配备了 超声波雷达、红外巡线传感器以及红外遥控传感器以赋予机器人更强大的感知能力。
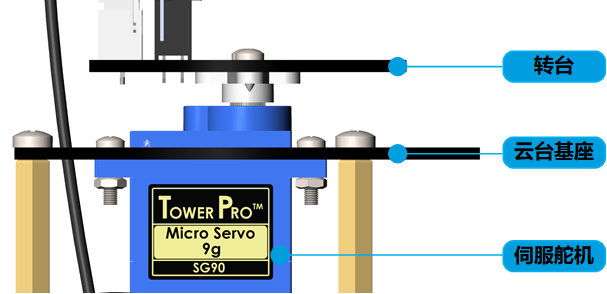
超声波雷达¶
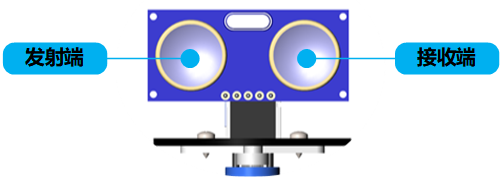
超声波雷达传感器利用超声波用来测量机器人前方障碍物的距离,它包括一个发射端和一个接收端,发射端 发生超声波信号,遇到障碍物信号被反射到接收端,利用超声波被反射的时间差和空气中的声速计算前方障碍物的距离。
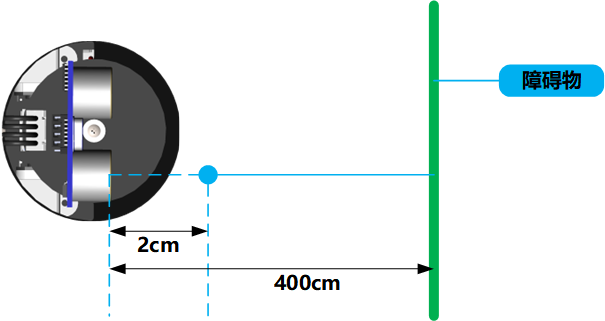
超声波雷达的探测范围为2cm-400cm,2cm以内为盲区,数据是不准确的。
红外巡线传感器¶
在机器人的底部前方位置安装了两个独立的红外巡线传感器,当传感器下方为黑色表面时(例如黑色胶带),发出信号 通知机器人。
当任何一个传感器遇到黑线时,对应的传感器指示灯(红色)会亮起,离开黑线时,指示灯熄灭。
产品规格¶
| 规格 | 参数 |
|---|---|
| 产品名称 | 墨豆机器人 |
| 产品型号 | DD-RB-WL-01 |
| 额定功率 | 1W |
| 工作电压 | DC 3.6~4.2 V |
| 电池类型 | 聚合物锂离子电池 |
| 电池容量 | 2000 mAh |
| 续航时间 | 5.5 h |
| 产品尺寸 | L123*W132*H104 mm |
| 包装尺寸 | L200*W150*H60 mm |
| 产品净重 | 207 g |
| 驱动方式 | 两轮差分 |
| 电机类型 | 直流减速电机 |
| 最高速度 | 1.2 m/s |
| 传感器 | 红外遥控、红外循迹、超声波 |