组装你的机器人¶
在这里你将学会如何一步一步安装你的墨豆机器人
安装步骤¶
接着我们将一步一步地指引你如何组装属于你自己地机器人,让我们开始动手吧
第1步 : 组装云台转台¶
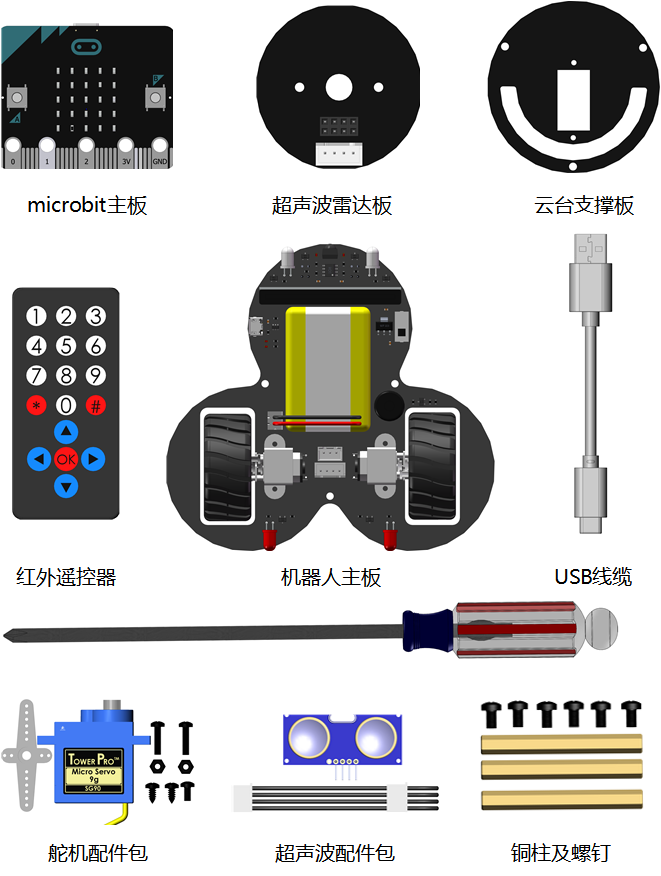
你需要准备
- 舵机支臂 × 1
- 超声波雷达板 × 1
- 小号自攻钉螺丝 × 2
- 超声波传感器 × 1
- 超声波传感器线缆 × 1
- 十字螺丝刀 × 1
按照下面地步骤完成安装
安装完成后的效果
第3步 :连接主板和云台基座¶
你需要准备
- 组装完毕的云台基座 × 1
- 机器人主板 × 1
- microbit主板 × 1
- M3铜柱 x 3
- M3螺钉 x 6
- 十字螺丝刀 × 1
按照下面的步骤完成安装
安装完成后的效果
第4步 连接云台头和基座¶
你需要准备
- 组装完毕的云台状态 × 1
- 组装完毕的云台基座和主板 × 1
- M2舵机螺钉
- 十字螺丝刀
将机器人电源开关拨至 ON 状态打开电源,默认的出厂程序会自动校准舵机零点
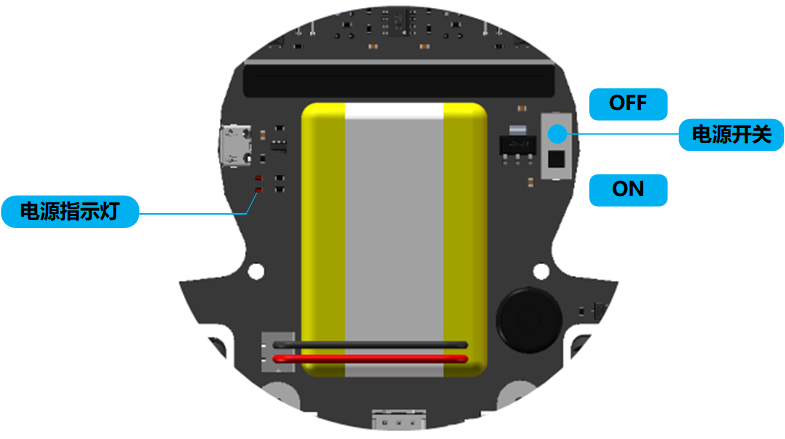
几秒钟后将机器人电源开关拨至 OFF 状态关闭电源,按照下面的步骤完成安装,注意 超声波传感器要面向机器人的正前方安装
安装完成后的效果
好了,恭喜你完成了墨豆机器人的安装,接下来你可以选择学习中心其它的课程去学习了。